
مشکل کنترل خطی
سلام
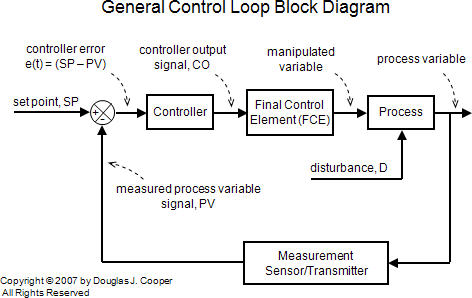
یه مشکلی که اخیرا حس میکنم اینه که درس کنترل خطی رو خیلی خوب درس نمیدن به ملت ، از کد هایی که برای پروژه الک صنع زدن معلومه ، هنوز مفهوم لوپ کنترل رو بهشون یاد ندادن ، حس میکنم میدونم مشکل از چیه،
من خودم اوایل که درس کنترل خطی رو برنداشته بودم همش سوالم این بود که چجوری میشه تو میکرو یه کدی زد که مثلا سرعت یک موتور رو کنترل کنه ؟
راه حل هایی که به ذهنم میرسید این بود که مثلا بزنیم سرعت رو بگیره ، بعد اگه کم بود زیادش کنه 1 واحد اگه کم بود 1 واحد کمش کنه. یا خیلی راه حل هایی ازین قبیل...
خوشبختانه با برداشتن این درس و کلی سرچ کردن و زدن پروژه کنترل زاویه موتور تهش متوجه شدم که باید یه کنترلری درست کنیم که کارا رو انجام بده... ولی الان میبینم تو کد های ملت یا صحبت هاشون خیلی از بچه ها مثلا کارای عجیبی کردن ، با نوشتن if و مقایسه کردن ولتاژ خروجی PWM رو تنظیم میکنن یا یکی از دوستان میگفت که چون error از جنس اختلافه پس باید تو خروجی کنترلر از PWMیی که میخوایم کمش کنیم...
این ها ممکن هست کار کنه ولی نشون میده که اساتید کنترل عزیز بلد نیستن که چطور معنی لوپ کنترل رو به دانشجو بفهمونن واقعا از درس کنترل خطی بیشتر از این انتظاریه ؟ این حداقل انتظاره...
در ضمن یه مورد دیگه ای هم که خوب درس داده نمیشه نوع سیستم هاست... این که یه سیستمی میتونه یه منحنی ورودی رو دنبال کنه یا نه ... اینم اصلا یاد نمیدن،
بهتر نیست اساتید عزیز سعی کنن با دادن دوتا CA خوب یا پروژه ، به جای یاد دادن کنترل مدرن به کسی که کنترل خطی رو پاس نکرده تا تهش!!! ، حداقل به دانشجو بفهمونن که نسبت به فلان چیز خطا داشتن چیه...
بزارید برداشت های خودم رو از این چیزا بنویسم:
معمولا سیستم هایی که ما باهاش طرفیم و میخوایم دم دستی کنترلش کنیم رو میشه به شکل مرتبه 1 و یا مرتبه 2 نوشت.
مثلا این پروژه الک صنع (البته غیر خطیه ولی...)
وقتی سیستم خاموشه و بهش دیوتی سایکل مثلا 50% میدیم سیستم شروع میکنه میره بالا تا به ولتاژ 24 ولت میرسه. این مدل بالا رفتن رو سیستم های مرتبه 1 هم دارن... پس میتونیم فرض کنیم سیستم شبیه یک سیستم مرتبه 1 هست .
حالا فرض کنید میخوایم کنترلش کنیم
فرض میکنیم که مدلش این سیستم مرتبه 1 باشه

مدل خوبیه ، چون که شبیه سیستم خودمون میرهه بالا
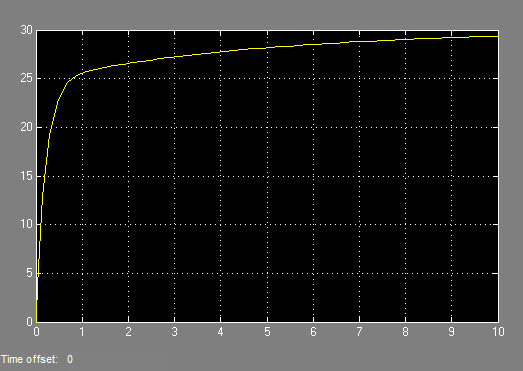
حالا میایم حلقه کنترل رو میبندیم و ورودیش رو 30 میزاریم و برای کنترل یک P تنها میزاریم با مقدار 4:

خروجی اسکوپ میشه :

یعنی این که با یه خطایی به مقدار نهایی میرسه که خوب نیست ... نمیتونه پله رو دنبال کنه چون تو تابع تبدیلش قطب تو 0 نداره
حالا میایم یک I هم اضافه میکنیم... I یک قطب به تابع حلقه باز اضافه میکنه پس انتظار داریم خطا 0 بشه

بعد اسکوپ رو میبینیم
خیلی دیر میرسه
گین انتگرال گیر رو زیاد میکنیم:

خروجی به خوبی میرسه به 30

حالا هی بیا قضیه مقدار نهایی رو بنویس ... خب اگه این قضیه جواب میداد که ملت نمیپرسیدن خطا یعنی چی ...
بعد بیاید کنترل مدرن رو براشون ببند آخه از اوگاتا که خفن تر نیستی د، اون قدر که اون درس داده مدرن رو تو خطی درس بدید ملت زده نشن و جداقل این مسائل بیسیک کنترل رو بفهمن... کسی که یک ترم سر کلاست میاد این چیزا رو وقتی بلد نیست یعنی این که شما نه تنها وقت خودتون رو تلف کردید بلکه وقت بچه ها رو هم تلف کردید

